| このコーナーでは、技術研究所をはじめとするマイコムの技術現場の最新情報を紹介しています。 今月は、MECHATROLINK-Ⅱに対応した新製品の5相ステッピングモータ用ドライバ「MLN50シリーズ」の制御方法や通信コマンド等についてご紹介します。 MECHATROLINKに対応したステッピングモータ用のドライバは一般的なステッピングモータ制御のシステム構成とは違い、上位よりコマンドを受けドライバ内部でパルスを生成しモータを制御します。(下図参照) 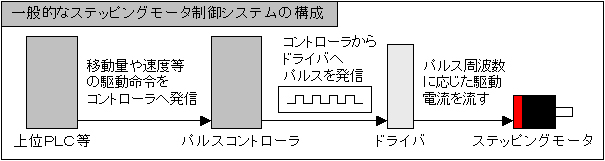 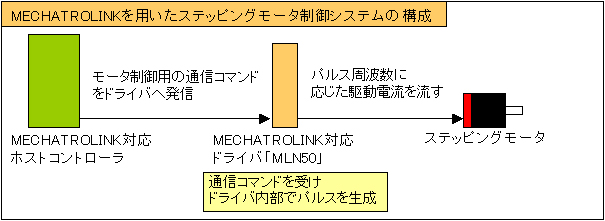 以下では、MECHATROLINK対応ステッピングモータドライバの「MLN50シリーズ」を制御する際に使用する、位置決め用のコマンドにつきましてご紹介致します。
MECHATROLINK-Ⅱ対応5相ステッピングモータ・ドライバ「MLN50シリーズ」の製品情報はこちら MECHATROLINK-Ⅱ対応ホストコントローラボード「MLH20-1030」の製品情報はこちら |
||||||||||||||||||||